General motors have been around for many years. They are the main force in almost every industry. Inverter motor is a newer concept, when the motor starts to be driven by vfd (inverter or AC drive), this concept becomes very necessary. As a result of the long cable length, the inverter load motor can run at a very slow speed without overheating, even with all the voltage peaks generated by the VFD.This performance comes at the cost of cost: inverter-loaded motors can be much more expensive than general-purpose motors. The guideline for choosing between iron horse general motor and inverter load motor is given below. If your application complies with the guidelines below, there is no need to apply an inverter to load the motor.
Note: Marathon inverter motors also have limitations. Please refer to the marathon section for details.
Background: AC motors can be driven by jumper contactors and starters. The electricity sent to the motor is a very clean (real) sine wave at 60Hz. Noise and voltage peaks are relatively small. However, there are disadvantages: the car can only run at one speed (deceleration is usually handled by a gearbox or other, usually inefficient, mechanical means) and current intrusion (when the motor is turned on for the first time) is usually 5 to 6 times the normal current Exercise consumption. This type of deceleration device is expensive and cumbersome, and this airflow can cause serious damage to the electrical system and load (imagine the air conditioning system in an old house-when the compressor is turned on, the lights dim; now imagine the same situation again) , If there is an engine the size of a small car).
Note: The following discussion only applies to three-phase motors.
1. Input VFD (variable frequency drive):
In addition to allowing the motor speed to change whilst running, drivers were introduced to reduce the inrush current that occurs when the motor is first cranked up.To do this, the drive needs to input 60Hz AC power and rectify it to DC voltage. Each drive has a DC bus, which is approximately 1.414 (root number 2) * incoming AC line voltage.
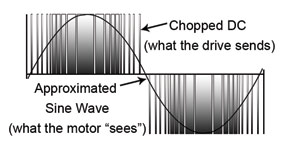
This DC voltage is then “cut” by the power transistor at a very high frequency to simulate the sine wave sent to the motor. By converting the input power to DC power and then converting it to AC power, the drive can change its output voltage and output frequency, thereby changing the speed of the motor. Everything sounds great, right? We want to control the frequency and voltage output to the motor, thereby controlling its speed.
2. Some things to note:
A general-purpose motor driven by a vfd may overheat if it runs too slowly. (If the engine runs at a speed lower than the rated speed, it will generate heat.) Since most general-purpose motors cool themselves by a fan mounted on the shaft, low speed means less cooling. If the motor overheats, the bearing and insulation life will be reduced. Therefore, all motors have a minimum speed requirement.
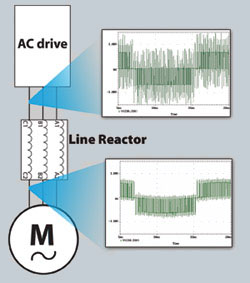
The voltage “chopping” that occurs in the drive actually sends high voltage spikes (at the DC bus level) down the wire to the motor. If the system contains a long cable, reflected waves will appear at the motor. The reflected wave can effectively double the voltage on the wire. This may cause premature failure of the motor insulation. The long cable length between the motor and the drive increases the harmful effects of reflected waves, as does the high chopping frequency (listed as the carrier frequency in the drive manual). Line reactance, a 1:1 transformer placed at the output of the drive, can help reduce voltage spikes from the drive to the motor. When the motor is far away from the drive, line reactors are used in many cases.
In summary, general-purpose motors can operate with drives in many applications; however, inverter load motors are designed to handle lower speeds without overheating, and they can withstand higher voltage spikes without their insulation failure. As the performance increases, so does the cost. If you need higher performance, then the extra cost is worth it.